
Unitree Go2 RL Policy for Locomotion

A PPO-based RL controller for a Unitree Go2 robot dog in NVIDIA Isaac Sim that has custom rewards and the Raibert heuristic implemented for a stable, natural walking gait, and an actuator friction model implemented for increased simulation accuracy. The model was trained for plane, stepped, and rough terrains.
2D Quadrotor MPC Controller
SQP and MPC-based trajectory following controller for a 2D quadrotor. The controller was designed to execute a full loop maneuver. A simpler linear state position controller has also been implemented

Content-Based Image Retrieval for VPR
A Content-Based Image Retrieval system for Visual Place Recognition that has a ResNet-18 model implemented for generating semantic image embeddings, and a KD-Tree spatial indexing structure implemented for efficient nearest-neighbor lookups. The model was evaluated using the NYU-VPR dataset.
Lucas-Kanade Optical Flow
A custom Lucas-Kanade optical flow algorithm for feature tracking.
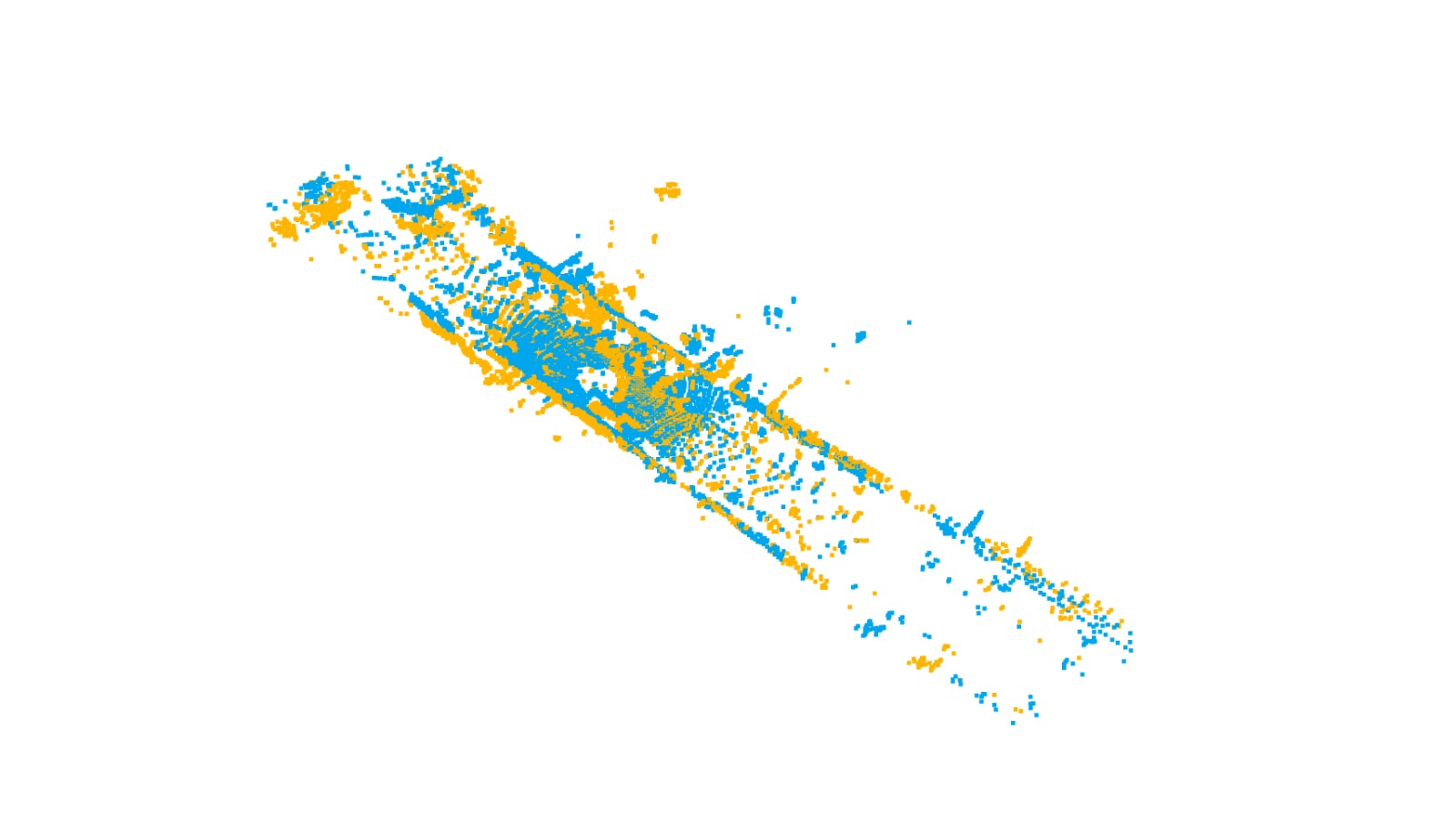
ICP Point Cloud Registration
A custom implementation of Iterative Closest Point (ICP) algorithm for point cloud registration for 3D mapping. The code was tested on the Kitti dataset
Inverted Pendulum Q-Learning Control
A Q-learning-based reinforcement learning controller for the inverted pendulum problem.
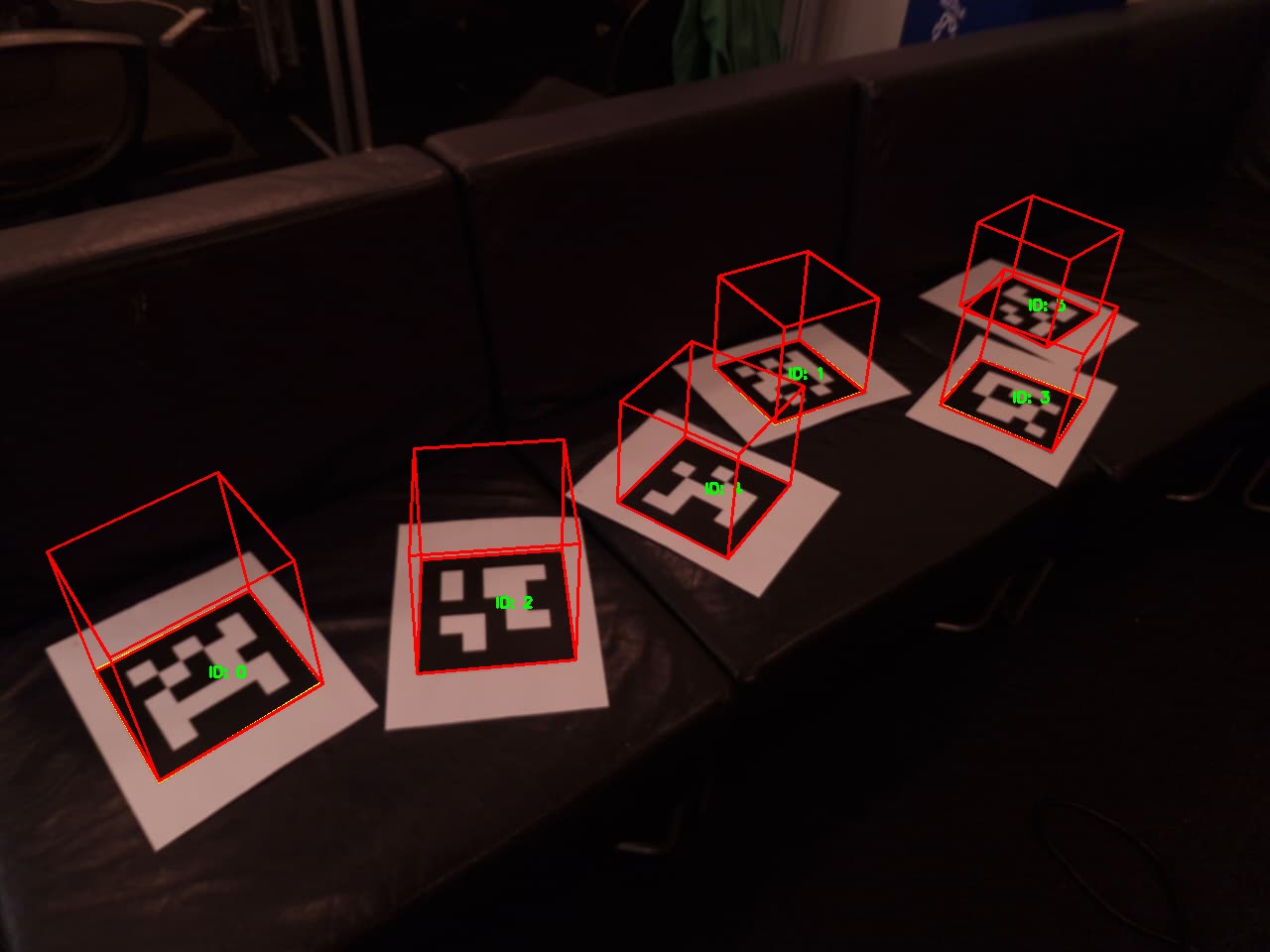
Camera Calibration and AprilTag AR
AR camera calibration pipeline implemented for intrinsic estimation, and an AprilTag detection code implemented for pose tracking. The implementation was designed to render 3D geometric cubes onto physical tags in a scene.
Hexapod Robot Design and Control
A custom gesture-controlled hexapod robot that has an on-board microcontroller (several used over the length of the project including BS2, Arduino, RasPi etc...) and Wi-Fi telemetry implemented for custom gait algorithmss